剛体の運動方程式①ベクトルの微分
5.5K Views
August 08, 22
スライド概要
■ドローンやロボットを自作することを通じて制御や関連技術の生涯勉強情報を提供■工学博士■防大航空宇宙→筑波大博士■陸自→対戦車誘導弾等の装備品開発→高専教員→大学教員■ロボットランサー優勝→マイクロマウスニューテクノロジー賞受賞■指導者としてつくばチャレンジバンナム賞→飛行ロボコンマルチコプタ部門1位等々■北海道函館出身
関連スライド

StampFlyで学ぶマルチコプタ制御


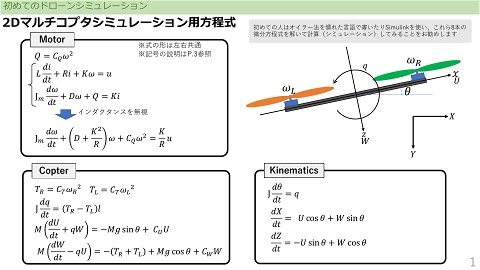
ドローンの2Dシミュレーション
各ページのテキスト
ベクトルの微分 剛体の運動⽅程式①
剛体の運動⽅程式 この世界の運動は、x軸、y軸、z軸の3つの座標 軸それぞれに並進運動と回転運動合わせて6つの運動 で表現する。 そのため6本の剛体の運動⽅程式を⽤いて表される。 運動⽅程式を⽴て計算することで、あらゆる物体の 運動は事前に推定することができ、航空機をはじめ、 ⾞、電⾞、⼈⼯衛星、宇宙船等多くの「もの」の開発 に⽣かされている。 ※剛体とは形の変わらない物体のこと
剛体の運動⽅程式の形
剛体の運動⽅程式 並進運動 𝑑(𝑚𝑽) = Σ𝑭 𝑑𝑡 回転運動 𝑑𝑯 = Σ𝑴 𝑑𝑡
剛体の運動⽅程式 並進運動 運動量ベクトル 𝑑(𝑚𝑽) = Σ𝑭 𝑑𝑡 回転運動 物体に作⽤する ⼒のベクトルの総和 ⾓運動量ベクトル 𝑑𝑯 = Σ𝑴 𝑑𝑡 物体に作⽤する ⼒のモーメントベクトルの総和
剛体の運動⽅程式 並進運動 𝑑(𝑚𝑽) = Σ𝑭 𝑑𝑡 回転運動 𝑑𝑯 = Σ𝑴 𝑑𝑡 剛体の運動⽅程式とは、運動量 あるいは⾓運動量の時間微分が ⼒の総和あるいはモーメントの 総和に等しいという事実を表し ている。
剛体の運動⽅程式 並進運動 ベクトルの 微分が必要 𝑑(𝑚𝑽) = Σ𝑭 𝑑𝑡 回転運動 ベクトルの 微分が必要 𝑑𝑯 = Σ𝑴 𝑑𝑡 剛体の運動⽅程式とは、運動量 あるいは⾓運動量の時間微分が ⼒の総和あるいはモーメントの 総和に等しいという事実を表し ている。
ベクトル
ベクトル ベクトルの成分表⽰ 𝐴! 𝑨 = 𝐴" 𝐴# z 𝐴# 𝑨 = 𝐴! 𝑨 𝐴" y x 𝐴! 𝐴" 𝐴# $
ベクトル ベクトルの成分表⽰ 太字 z 𝐴# 𝐴! 𝑨 = 𝐴" 𝐴# 𝑨 = 𝐴! 𝐴" y 𝐴! 縦書き 縦ベクトル 𝐴" 𝐴# $ 転置 𝑨 x 細字 横書き
ベクトル ベクトルの成分表⽰ 𝐴! 𝑨 = 𝐴" 𝐴# z 𝐴# 𝒌 𝑨 𝒊 x 𝐴! 𝑨 = 𝐴! 𝒋 𝐴" 𝐴# $ 単位ベクトルを⽤いたベクトルの表記 𝐴" y 単位ベクトル 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌
ベクトルの外積
外積 𝑨 = 𝑎! 𝑩 = 𝑏! 𝑎" 𝑎# 𝑏" 𝑏# 𝒊 𝑨×𝑩 = 𝑎! 𝑏! 𝒋 𝑎" 𝑏" 𝒌 𝑎# 𝑏# = (𝑎" 𝑏# − 𝑎# 𝑏" )𝒊 + (𝑎# 𝑏! − 𝑎! 𝑏# )𝒋 + (𝑎! 𝑏" − 𝑎" 𝑏! )𝒌
外積 𝑨 = 𝑎! 𝑩 = 𝑏! 𝑎" 𝑎# 𝑏" 𝑏# 𝒊 𝑨×𝑩 = 𝑎! 𝑏! 𝒋 𝑎" 𝑏" 𝒌 𝑎# 𝑏# = (𝑎" 𝑏# − 𝑎# 𝑏" )𝒊 + (𝑎# 𝑏! − 𝑎! 𝑏# )𝒋 + (𝑎! 𝑏" − 𝑎" 𝑏! )𝒌
外積 𝑨 = 𝑎! 𝑩 = 𝑏! 𝑎" 𝑎# 𝑏" 𝑏# 𝒊 𝑨×𝑩 = 𝑎! 𝑏! 𝒋 𝑎" 𝑏" 𝒌 𝑎# 𝑏# = (𝑎" 𝑏# − 𝑎# 𝑏" )𝒊 + (𝑎# 𝑏! − 𝑎! 𝑏# )𝒋 + (𝑎! 𝑏" − 𝑎" 𝑏! )𝒌
外積 𝑨 = 𝑎! 𝑩 = 𝑏! 𝑎" 𝑎# 𝑏" 𝑏# 𝑖 𝑨×𝑩 = 𝑎! 𝑏! 𝑗 𝑎" 𝑏" y 𝐵 𝐴 𝐴×𝐵 x z 𝑘 𝑎# 𝑏# 外積もベクトル = (𝑎" 𝑏# − 𝑎# 𝑏" )𝒊 + (𝑎# 𝑏! − 𝑎! 𝑏# )𝒋 + (𝑎! 𝑏" − 𝑎" 𝑏! )𝒌 x成分 y成分 z成分
外積の⼤きさは ⾯積に等しい 外積 𝑨 = 𝑎! 𝑩 = 𝑏! 𝑎" 𝑎# 𝑏" 𝑏# 𝑖 𝑨×𝑩 = 𝑎! 𝑏! 𝑗 𝑎" 𝑏" y 𝐵 𝐴 𝐴×𝐵 x z 𝑘 𝑎# 𝑏# 外積もベクトル = (𝑎" 𝑏# − 𝑎# 𝑏" )𝒊 + (𝑎# 𝑏! − 𝑎! 𝑏# )𝒋 + (𝑎! 𝑏" − 𝑎" 𝑏! )𝒌 x成分 y成分 z成分
モーメントと⾓運動量
モーメントの定義 外積 𝑨×𝑩 をBのモーメントと呼ぶ y 𝑩 𝑨 𝑨×𝑩 x z
運動量 質量 𝑚 速度 𝑽 = 𝑢 運動量 𝑚𝑽 𝑣 𝑤 !
⾓運動量 運動量 𝑚𝑽 位置ベクトル 𝒓 y 𝑚𝑽 𝑚 𝒓 𝒓×𝑚𝑽 x 運動量のモーメント 𝒓×𝑚𝑽 運動量のモーメントを⾓運動量と呼ぶ z
回転する座標系に定義された ベクトルの微分
回転する座標系とベクトル 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 z 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 座標系の回転⾓速度を表すベクトル 𝒊 𝒋𝑞 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝐴" y
ベクトルの微分 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 z 座標系の回転⾓速度を表すベクトル 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝒊 ベクトルの微分 𝒋 𝑞 𝐴" y 𝑑𝑨 𝑑𝐴! 𝑑𝒊 = 𝒊 + 𝐴! 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝐴" 𝑑𝒋 + 𝒋 + 𝐴" 𝑑𝑡 𝑑𝑡 𝑑𝐴# 𝑑𝒌 + 𝒌 + 𝐴# 𝑑𝑡 𝑑𝑡 掛け算の 微分を適⽤
ベクトルの微分 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 z 座標系の回転⾓速度を表すベクトル 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝒊 ベクトルの微分 𝒋 𝑞 𝐴" y 𝐴! 𝐴! , 𝐴" , 𝐴# の時間の経過 による変位 𝑑𝑨 𝑑𝐴! 𝑑𝒊 = 𝒊 + 𝐴! 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝐴" 𝑑𝒋 + 𝒋 + 𝐴" 𝑑𝑡 𝑑𝑡 𝑑𝐴# 𝑑𝒌 + 𝒌 + 𝐴# 𝑑𝑡 𝑑𝑡 𝒊, 𝒋, 𝒌 の時間微 分は判れば すっきりする 部分
回転する座標系の 単位ベクトルの微分
回転座標系の 単位ベクトルの微分 z 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝐴" y 𝒊(𝑡)
回転座標系の 単位ベクトルの微分 z 𝑟ℎ𝒋 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒊(𝑡) 𝒋𝑞 𝐴" y 𝒊(𝑡 + ℎ)
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝐴" y 𝑟ℎ𝒋 𝒊(𝑡 + ℎ)
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 x 𝐴! 𝒊(𝑡 + ℎ) 𝒌 𝑨 𝑝 𝑟ℎ𝒋 𝒊 𝒋𝑞 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 𝐴" y
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 微分の定義に基づいて単位ベクトルの微分について考える 𝐴" y 𝑑𝒊 = 𝑑𝑡
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 微分の定義に基づいて単位ベクトルの微分について考える 𝐴" y 𝑑𝒊 𝒊 𝑡 + ℎ − 𝒊(𝑡) = lim 𝑑𝑡 #→% ℎ
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 𝐴" y 𝑑𝒊 𝒊 𝑡 + ℎ − 𝒊(𝑡) = lim 𝑑𝑡 #→% ℎ 𝒊 𝑡 + 𝑟ℎ𝒋 − 𝑞ℎ𝒌 − 𝒊(𝑡) = lim #→% ℎ
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 𝐴" y 𝑑𝒊 𝒊 𝑡 + ℎ − 𝒊(𝑡) = lim 𝑑𝑡 #→% ℎ 𝒊 𝑡 + 𝑟ℎ𝒋 − 𝑞ℎ𝒌 − 𝒊(𝑡) = lim #→% ℎ 𝑟ℎ𝒋 − 𝑞ℎ𝒌 = lim = 𝑟𝒋 − 𝑞𝒌 #→% ℎ
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 𝐴" y 𝒊 𝑑𝒊 = 𝑟𝒋 − 𝑞𝒌 = 𝑝 𝑑𝑡 1 𝒋 𝑞 0 𝒌 𝑟 = 𝝎×𝒊 0
回転座標系の 単位ベクトルの微分 𝒊(𝑡) z −𝑞ℎ𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑟ℎ𝒋 𝒊(𝑡 + ℎ) 回転𝝎によってℎ時間の 間に動いた𝒊ベクトル 𝐴" y 𝒊 𝑑𝒊 = 𝑟𝒋 − 𝑞𝒌 = 𝑝 𝑑𝑡 1 𝑑𝒋 = 𝝎×𝒋 𝑑𝑡 𝑑𝒌 = 𝝎×𝒌 𝑑𝑡 𝒋 𝑞 0 𝒌 𝑟 = 𝝎×𝒊 0
ベクトルの微分 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 z 座標系の回転速度を表すベクトル 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝒊 ベクトルの微分 𝒋 𝑞 𝐴" y 𝐴! 𝐴! , 𝐴" , 𝐴# が時間で変化 すれば0ではない部分。 𝑑𝑨 𝑑𝐴! 𝑑𝒊 = 𝒊 + 𝐴! 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝐴" 𝑑𝒋 + 𝒋 + 𝐴" 𝑑𝑡 𝑑𝑡 𝑑𝐴# 𝑑𝒌 + 𝒌 + 𝐴# 𝑑𝑡 𝑑𝑡 𝒊, 𝒋, 𝒌 の時間微 分は判れば すっきりする 部分
ベクトルの微分 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 座標系の回転速度を表すベクトル z 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! ベクトルの微分 𝒊 𝒋𝑞 𝐴" y 𝑑𝑨 𝑑𝐴! = 𝒊 + 𝐴! 𝝎×𝒊 𝑑𝑡 𝑑𝑡 𝑑𝐴" + 𝒋 + 𝐴" 𝝎×𝒋 𝑑𝑡 𝑑𝐴# + 𝒌 + 𝐴# 𝝎×𝒌 𝑑𝑡
ベクトルの微分 単位ベクトルを⽤いたベクトルの表記 𝑨 = 𝐴! 𝒊 + 𝐴" 𝒋+ 𝐴# 𝒌 座標系の回転速度を表すベクトル z 𝝎 = 𝑝𝒊 + 𝑞𝒋 + 𝑟𝒌 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! ベクトルの微分 𝒊 𝒋𝑞 𝐴" y 𝑑𝑨 𝑑𝐴! = 𝒊 + 𝝎×𝐴! 𝒊 𝑑𝑡 𝑑𝑡 𝑑𝐴" + 𝒋 + 𝝎×𝐴" 𝒋 𝑑𝑡 𝑑𝐴# + 𝒌 + 𝝎×𝐴# 𝒌 𝑑𝑡 𝑑𝑨 = + 𝝎×𝑨 𝑑𝑡 ,
ベクトルの微分 ベクトルの微分 z 𝑑𝑨 𝑑𝑨 = 𝑑𝑡 𝑑𝑡 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝐴" y ここで 𝑑𝑨 𝑑𝑡 & $ + 𝝎×𝑨 𝑑𝐴( 𝑑𝐴' 𝑑𝐴) = 𝒊+ 𝒋+ 𝒌 𝑑𝑡 𝑑𝑡 𝑑𝑡 = Ȧ ' 𝒊 + Ȧ ( 𝒋 + Ȧ ) 𝒌
ベクトルの微分成分表⽰ ベクトルの微分 𝑑𝑨 𝑑𝑨 = 𝑑𝑡 𝑑𝑡 z 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑑𝑨 ここで 𝑑𝑡 , $ + 𝝎×𝑨 𝑑𝐴" 𝑑𝐴! 𝑑𝐴# = 𝒊+ 𝒋+ 𝒌 𝑑𝑡 𝑑𝑡 𝑑𝑡 = Ȧ ! 𝒊 + Ȧ " 𝒋 + Ȧ # 𝒌 𝐴" y ベクトルの微分の成分表⽰ 𝐴̇ ! 𝑖 𝑑𝑨 = 𝐴̇ " + 𝑝 𝑑𝑡 𝐴! 𝐴̇ # 𝑗 𝑞 𝐴" 𝑘 𝑟 𝐴#
ベクトルの微分成分表⽰ ベクトルの微分 𝑑𝑨 𝑑𝑨 = 𝑑𝑡 𝑑𝑡 z 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑑𝑨 ここで 𝑑𝑡 , $ + 𝝎×𝑨 𝑑𝐴" 𝑑𝐴! 𝑑𝐴# = 𝒊+ 𝒋+ 𝒌 𝑑𝑡 𝑑𝑡 𝑑𝑡 = Ȧ ! 𝒊 + Ȧ " 𝒋 + Ȧ # 𝒌 𝐴" y ベクトルの微分の成分表⽰ 𝐴̇ ! 𝑞𝐴# − 𝑟𝐴" 𝑑𝑨 = 𝐴̇ " + 𝑟𝐴! − 𝑝𝐴# 𝑑𝑡 𝑝𝐴" − 𝑞𝐴! 𝐴̇ #
ベクトルの微分成分表⽰ ベクトルの微分 𝑑𝑨 𝑑𝑨 = 𝑑𝑡 𝑑𝑡 z 𝐴# 𝑟 𝒌 𝑨 𝑝 x 𝐴! 𝒊 𝒋𝑞 𝑑𝑨 ここで 𝑑𝑡 , $ + 𝝎×𝑨 𝑑𝐴" 𝑑𝐴! 𝑑𝐴# = 𝒊+ 𝒋+ 𝒌 𝑑𝑡 𝑑𝑡 𝑑𝑡 = Ȧ ! 𝒊 + Ȧ " 𝒋 + Ȧ # 𝒌 𝐴" y ベクトルの微分の成分表⽰ 𝐴̇ ! + 𝑞𝐴# − 𝑟𝐴" 𝑑𝑨 = 𝐴̇ " + 𝑟𝐴! − 𝑝𝐴# 𝑑𝑡 𝐴̇ # + 𝑝𝐴" − 𝑞𝐴!
課題1 外積の計算練習 𝑨= 1 2 3 𝑩= 4 5 6 𝑨×𝑩を計算しなさい
課題2 並進運動の運動⽅程式の展開 ⾓速度𝝎で回転する座標系に定義された運動量ベクトル𝑚𝑽の微 分を計算しなさい。 速度ベクトル 𝑽 = 𝑢 𝑣 𝑤 $ 座標系の⾓速度ベクトル 𝝎 = 𝑝 𝑞 𝑟 $